Driver Analysis and Intent
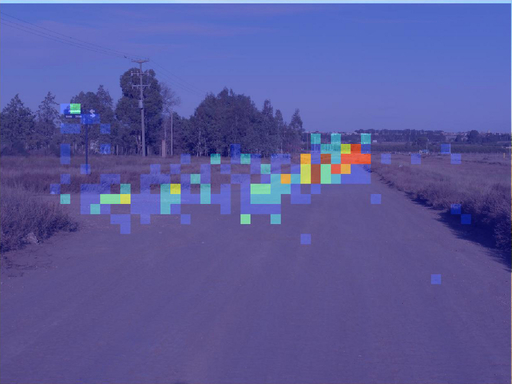
It is well studied that visual attention patterns and the associated eye movements reflect cognitive processes. There have been many research works on the role of eye movements in executing everyday visually guided behaviors, where eye trackers measurements were used. Our work is focused on learning about how humans visually inspect an scene while their are making driving tasks. It is of our interest to get some clues about whether there are specific places in the scene that are strategic to determine the behaviour, and in which moment the observer pays attention to them. We are using eye tracker equipment as EEG signals to correlate brain processing and eye movement.
